")
")
Projekt realizowany w ramach umowy z NCBiR nr DOB-BIO7/25/02/2015 w latach 2015-2018
Tło projektu: Co to jest system SSA i dlaczego powinniśmy uczestniczyć w jego budowie?
Pozyskanie zdolności do obserwacji oraz śledzenia obiektów kosmicznych, w tym zwłaszcza sztucznych satelitów Ziemi są szczególnie istotne dla obronności i bezpieczeństwa państwa, zespól tych działań przyjęto nazywać jako SSA (Space Situation Awareness ).
SSA jest istotne z powodu:
- Planowanego wynoszenia własnych środków satelitarnych (satelity obserwacyjne i komunikacyjne).
- Potrzeba posiadania świadomości sytuacyjnej nt. obiektów wchodzących w atmosferę Ziemi w sposób niekontrolowany, co stanowi tzw. bezpośrednie zagrożenie mienia i zdrowia obywateli naszego kraju
- Trwałe zaangażowanie kraju w realizację nowych projektów kosmicznych (Polska Agencja Kosmiczna)
- Zwiększająca się liczba wynoszonych obiektów kosmicznych, również o militarnym zastosowaniu, pojawianie się w przestrzeni kosmicznej obiektów „pozakatalogowych”.
To są oczywiście „istotności” wynikające z definicji SSA. Jednakże należałoby się zastanowić, po co budować i w jakim zakresie narodowy (polski) system SSA ?
- Nadzorowanie przestrzeni kosmicznej „wokół” własnych obiektów (satelitów) pod kątem wykrywania zagrożeń kolizji („wokół” - oznacza konieczność analizy orbit wielu obiektów mogących stanowić zagrożenie, analiza oznacza wyznaczenie orbity oraz śledzenie samego obiektu, czyli wyznaczenie jego położenia w przestrzeni czterowymiarowej, a to z kolei oznacza KONIECZNOŚĆ posiadania własnej bazy danych z AKTUALIZOWANYMI jak najczęściej danymi)
- Nadzorowanie obiektów nas interesujących, np. satelitów obserwacyjnych państw nieprzyjaznych.
- Poszukiwanie, katalogowanie, rozpoznawanie oraz nadzorowanie obiektów nie znajdujących się w bazie (bazach) danych.
- W tej chwili nie mamy żadnego krajowego systemu, który byłby w stanie dostarczać informacji o położeniu interesujących nas satelitów (w sensie systemu posiadającego własną bazę danych – wszystkie systemy bazują na bazie danych NORAD/STRATCOM space-track.org lub zależnych).
- Baza ww. może zostać zamknięta lub dostęp do niej może zostać ograniczony, zatem jak najszybciej powinno się budować własną bazę danych.
- Wymiana informacji z partnerami z UE oraz z USA (jak wiadomo, szczególnie w kontaktach z USA podstawą jest zasada wzajemności - chcąc dostać interesujące nas informacje, musimy zaoferować informacje interesujące partnera; ponieważ obiektów na orbicie okołoziemskiej jest dużo, a ich orbity są najróżniejsze, więc nawet dla tak dużego „gracza kosmicznego” jak USA śledzenie wszystkich obiektów jest niewykonalne).
- Poszukiwanie śmieci kosmicznych (to jest problem pod względem znaczenia dla naszych interesów drugorzędny, natomiast istotny dla naszych partnerów z UE, zatem patrz pkt.6; część śmieci kosmicznych ma na tyle małe wymiary, że wykrycie i zidentyfikowanie ich może być problemem dla posiadanych sensorów).
Budowa krajowego systemu SSA.
Krajowy system SSA powinien zostać oparty na systemach znajdujących się w kraju. Jest to uwarunkowane względami bezpieczeństwa – w kraju można użyć do przesyłania danych łączy niepołączonych z Internetem (np. połączenia wojskowe), co w dużym stopniu zapewnia odporność np. na ataki hakerskie lub zablokowanie serwerów przez administratorów z innego kraju. Posiadane systemy obserwacyjne (teleskopy) poza granicami kraju są również do wykorzystania (tym bardziej, że na terenie naszego kraju, przeciętnie w roku, ok. 20-22% nocy jest tzw. nocami obserwacyjnymi), niemniej „serce obserwacyjne” polskiego systemu SSA powinno znajdować się w Polsce.
Systemy obserwacyjne usytuowane poza granicami kraju, ponieważ budowane były do celów obserwacji astronomicznych (ciemne niebo) znajdują się z reguły w terenach bezludnych (np. pustynia Atacama w Chile) – skazane są zatem na korzystanie z określonego punktu dostępu do Internetu, ich zlokalizowanie i zablokowanie przez atak hakerski to kwestia minut. Należy dodatkowo postawić pytanie o możliwości przesyłania informacji, w zasadzie o charakterze wojskowym, z terytorium innego państwa (być może wymagać to będzie renegocjacji umów, na podstawie których zlokalizowano obserwatoria w takich krajach jak RPA czy Australia; czym innym jest przesyłanie informacji dotyczących GRB, czym innym informacji o śledzeniu satelity; przypadek wykrywania czy śledzenia śmieci kosmicznych może być podciągnięty do kategorii obserwacji czysto cywilnych).
Proponowana struktura systemu narodowego SSA
System SSA powinien składać się z dwóch członów – pierwszy to komponent szerokokątny (WFOV) pozwalający na gromadzenie informacji obrazowej z szerokiego kąta widzenia, z naszych doświadczeń wynika, że maksymalnym, użytecznym polem widzenia jest ok. 120° (dalej refrakcja atmosferyczna na tyle deformuje uzyskane obrazy, że nieopłacalnym staje się zwiększanie tego kąta); drugim jest komponent wąskokątny (NFOV), którego pole widzenia wynosi od 20 do 60’ (0,33 do 1°). Komponent WFOV może zostać umieszczony na nieruchomym montażu, komponent NFOV na szybkim (>10°/s) montażu paralaktycznym lub altaz.
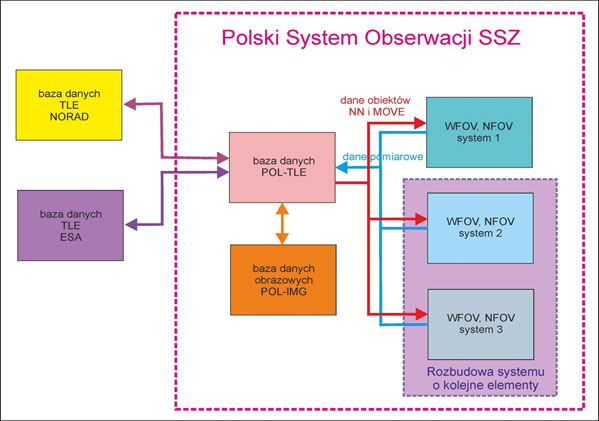 Rys. 1. Proponowana struktura systemu narodowego SSA
Rys. 1. Proponowana struktura systemu narodowego SSA
A. Segment krajowy
- stacja zawierająca komponent szerokokątny (WFOV) i wąskokątny (NFOV) (zwielokrotnienie stacji )
- samodzielne komponenty wąskokątne (teleskopy o polu widzenia ok. 1°)
B. Segment poza granicami kraju
- współpraca z Segmentem Krajowym
Opis systemu ASOPEK (SSA_PL).
System ASOPEK jest kompletnym systemem o modułowej budowie (modułowość zarówno hardware’owa jak i modułowość oprogramowania) umożliwiającym budowę kompletnego systemu Polskiego SST/SSA, zachowując przy tym możliwość jego rozbudowy i współpracy z innymi systemami (np. TLE NORAD oraz Eu-SSA). Co istotne potrafi pracować w czasie rzeczywistym (m.in. dzięki temu, że jest zlokalizowany w Polsce) lub w czasie zbliżonym do rzeczywistego.
Opis części sprzętowej
System składa się z:
- Komponentu sprzętowego:
- Zespół teleskopu szerokokątnego (WFOV) – teleskop składający się z 9 teleskopów w układzie „oka muchy” (każdy zawiera jasny obiektyw 50mm, f/1.2 oraz chłodzoną kamerę 16MPix, oraz dedykowany komputer) pokrywający pole widzenia 120°; teleskop WFOV jest umieszczony na nieruchomym montażu.
- Zespół teleskopu wąskokątnego (NFOV) – teleskop 16” f/8 (406mm) RC z dedykowaną chłodzoną kamerą 50MPix (kamera może pracować z częstotliwością 0,5 kl/s), umieszczony na szybkim montażu paralaktycznym.
- System akwizycji czasu – precyzyjny czas w systemie jest uzyskiwany z serwera czasu (komponenty systemu komunikują się poprzez sieć GigE) umieszczonego przy teleskopach, dzięki czemu możliwe jest uzyskiwanie dokładności czasowej zobrazowania poniżej 1μs, co umożliwia bardzo dokładne wyliczanie pozycji.
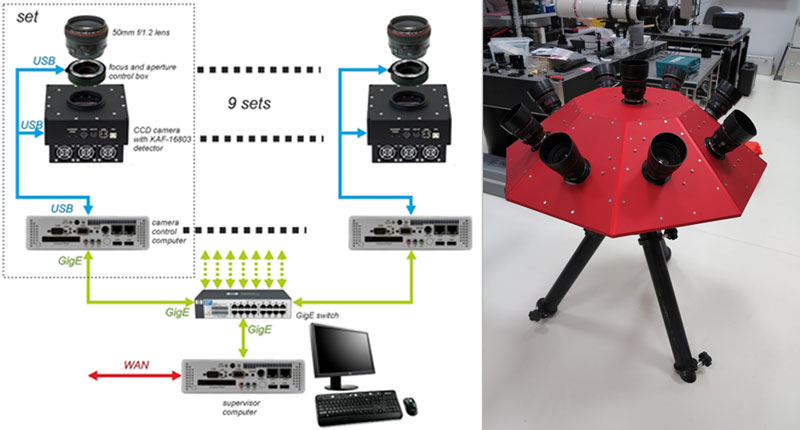 Rys. 2. Teleskop szerokokątny (WFOV) – schemat blokowy i widok w laboratorium
Rys. 2. Teleskop szerokokątny (WFOV) – schemat blokowy i widok w laboratorium
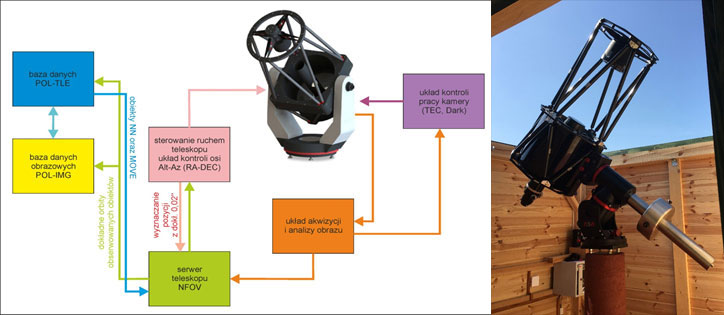 Rys. 3. Teleskop wąskokątny (NFOV) – schemat blokowy i widok teleskopu w obserwatorium
Rys. 3. Teleskop wąskokątny (NFOV) – schemat blokowy i widok teleskopu w obserwatorium
 Rys. 4. System kontroli i sterowania teleskopem NFOV i WFOV umieszczono w szafie typu rack (komputery, sprzęt sieciowy, serwer czasu, systemy zasilania DC i układy podtrzymywania napięcia zasilającego AC).
Rys. 4. System kontroli i sterowania teleskopem NFOV i WFOV umieszczono w szafie typu rack (komputery, sprzęt sieciowy, serwer czasu, systemy zasilania DC i układy podtrzymywania napięcia zasilającego AC).
- Komponentu software’owego (oprogramowanie – opis dalej):
- Oprogramowanie obsługujące hardware (sterowanie kamerami CCD, montażem paralaktycznym, elementami „utrzymana ruchu” – otwieranie/zamykanie obserwatorium, system odraszający, stacja pogodowa etc.)
- Oprogramowanie do akwizycji obrazów z kamer CCD.
- Oprogramowanie do rozpoznawania obrazu (wykrywanie „śladów” satelitów, analiza, wykrywanie gwiazd, pozycjonowanie obrazu w stosunku do gwiazd, korekta zniekształceń obrazu – korekta dystorsji dla teleskopu WFOV, korekta refrakcji dla teleskopu NFOV)
- Oprogramowanie do wyliczania elementów orbit wykrytych śladów.
- Oprogramowanie tworzące własną bazę danych typu TLE, z systemem zarządzania obserwacjami korygującymi dane oraz z możliwością dodawania dodatkowych danych (obrazowych, laserowych innych).
- Oprogramowanie do archiwizacji danych, komunikacji z zewnętrzną bazą danych, etc.
Działanie systemu ASOPEK:
- Pobierana jest aktualna baza TLE z centrum danych NORAD
- Po otrzymaniu sygnału o obiekcie zainteresowania (np. satelita COSMOS 1788) system szerokokątny rejestruje obiekt zainteresowania w momencie przejścia nad obserwatorium; w zależności od orbity uzyskujemy od dwóch do kilkunastu klatek z zarejestrowanym śladem przelotu.
- Na podstawie zarejestrowanych klatek z przelotem, oprogramowanie wylicza skorygowane elementy orbity pozwalające na naprowadzenie się teleskopu wąskokątnego.
- W zależności od orbity szukanego obiektu, przy bieżącym przelocie (dalsza orbita) lub następnym przelocie (niższa orbita), na satelitę kieruje się teleskop wąskokątny (pole widzenia ok. 1°), który rejestruje obrazy o dużej rozdzielczości przestrzennej (teoretyczna rozdzielczość przestrzenna teleskopu NFOV z kamerą 50MPix wynosi 0,39 sekundy łuku, co odpowiada 0,56m na odległości 300km, przyjmując praktycznie 1 arcsec otrzymujemy ok. 1.4m).
- Na podstawie zarejestrowanych obrazów z teleskopu NFOV obliczane są elementy zmodyfikowanej orbity, które są zapisywane we własnej bazie POL-TLE.
- Zespół teleskopu wąskokątnego może działać „samodzielnie” - może na podstawie częściowych danych „poszukiwać” obiektu w zadanym fragmencie nieba (np. 5°x5°) lub być sterowanym z zewnątrz.
Oprogramowanie systemu ASOPEK powstało w ITWL, służy do kontroli komponentu hardware’owego (sterowanie teleskopami, montazami, kamerami) oraz jest rozbudowanym systemem do analizy pozyskanych z teleskopów obrazów, obliczania orbit wykrytych obiektów i katalogowania ich w bazie danych POL-TLE:
KFGD - główna usługa (demon) sterowania kamerą i układem ostrości, realizuje akwizycję i analizę pozyskiwanych obrazów oraz detekcję śladów, obsługuje komunikaty zdalnego sterowania, pozyskane obrazy są zapisywane na dysku lokalnym i udostępniane przez FTP, natomiast wyniki są przekazywane do bazy danych;
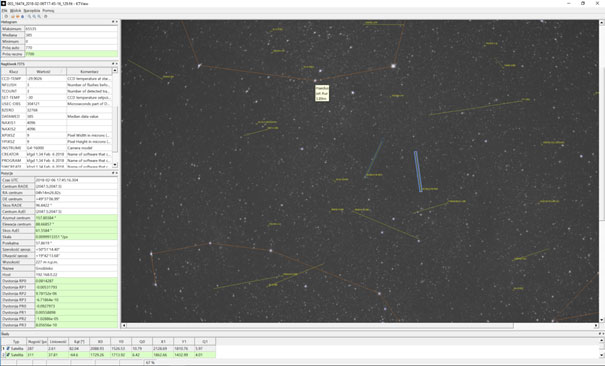
KTView - przeglądarka obrazów FITS. Dla obrazów zarejestrowanych w systemie umożliwia przegląd zarejestrowanych śladów satelitów oraz naniesienie na obraz pozycji znanych satelitów dla momentu obserwacji. Aplikacja KTView jest również domyślną przeglądarką sprzężoną z aplikacjami systemu: KTRecon i KTStationPilot. Przeglądarka umożliwia pobieranie przez FTP i wyświetlanie obrazów zgromadzonych na komputerach sterownikach kamer oraz współpracuje z bazą danych systemu. Przeglądarka wspomaga instalowanie kamer poprzez precyzyjne wyznaczenie ich położenia kątowego i współczynników dystorsji na podstawie porównania pozyskanego obrazu gwiazd i katalogu Tycho-2.
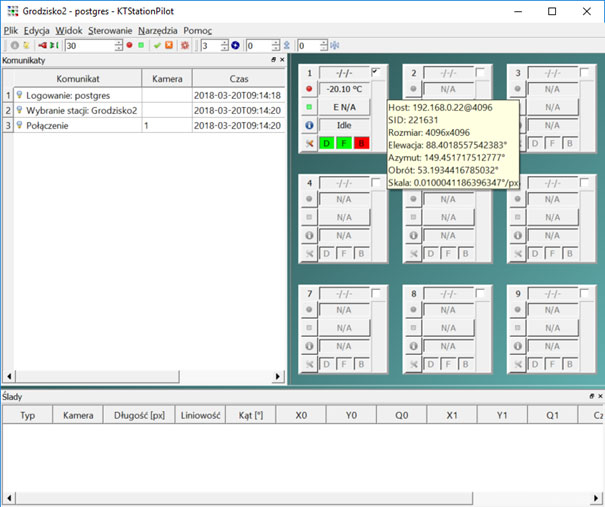
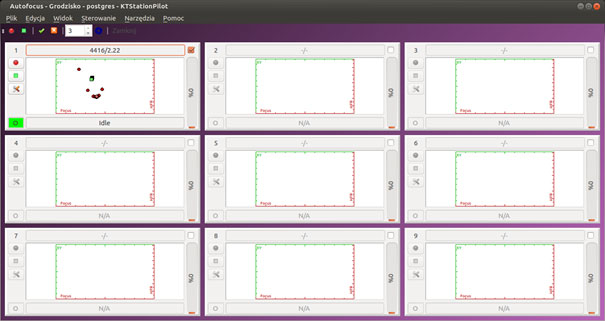
KTStationPilot - sterowanie systemem 9 kamer i obiektywów teleskopu WFOV poprzez komputery sterowniki kamer, kontrola procesu akwizycji obrazów w trybie „on line”, podgląd procesu detekcji śladów satelitów. Aplikacja komunikuje się z usługami KFGD sterowników kamer. Pozwala określić parametry pracy kamer i obiektywów oraz wykonać autofocus.
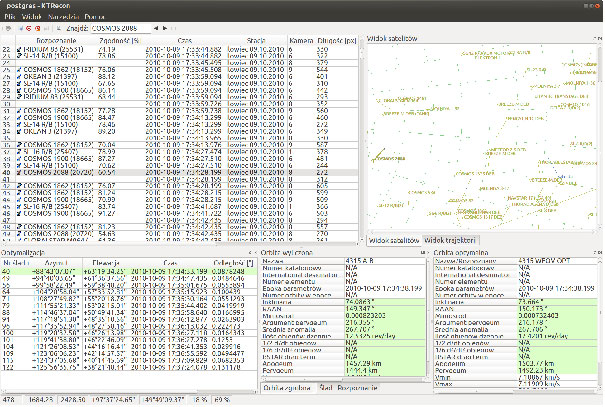
KTRecon - analiza danych pozyskanych na etapie akwizycji podsystemu WFOV polegająca na obliczeniu parametrów orbit satelitów na podstawie zarejestrowanych śladów oraz rozpoznanie śladów znanych satelitów. Wynikiem pracy programu KTRecon są dane w postaci parametrów orbity dla podsystemu NFOV. Analiza odbywa się na podstawie danych zapisanych w bazie danych podsystemu WFOV. Analiza jest przeprowadzana w trybie „off-line” w dowolnym momencie po zarejestrowaniu obrazów przez komputery sterujące kamerami.
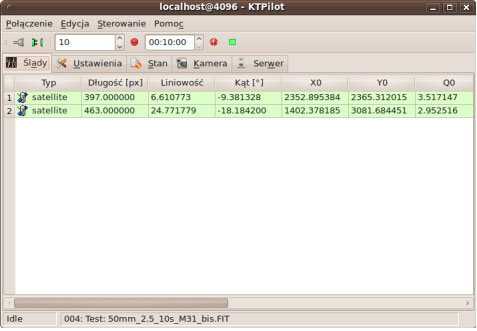
KTPilot - jest uproszczoną wersją aplikacji KTStationPilot. Aplikacja KTPilot przeznaczona jest do celów serwisowo-diagnostycznych, jest ona wykorzystywana na etapie uruchamiania i konfiguracji systemu. Pozwala ona na zdalne sterowanie jednym komputerem sterującym kamery, nie korzysta z konfiguracji systemu zapisanej w bazie danych.
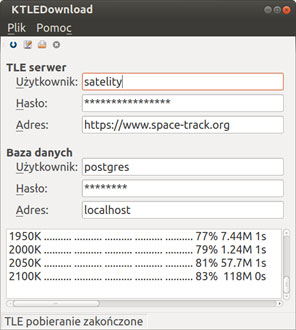
KTLEDownload – aplikacja służy do cyklicznej aktualizacji bazy danych znanych satelitów danymi z systemów zewnętrznych (np. NORAD). Aplikacja może być uruchamiana w trybie okienkowym oraz w trybie konsolowym (z linii poleceń). Aplikacja umożliwia aktualizację bazy danych bezpośrednio z serwisu space-track.org poprzez sieć lub za pomocą dostarczonego pliku TLE.
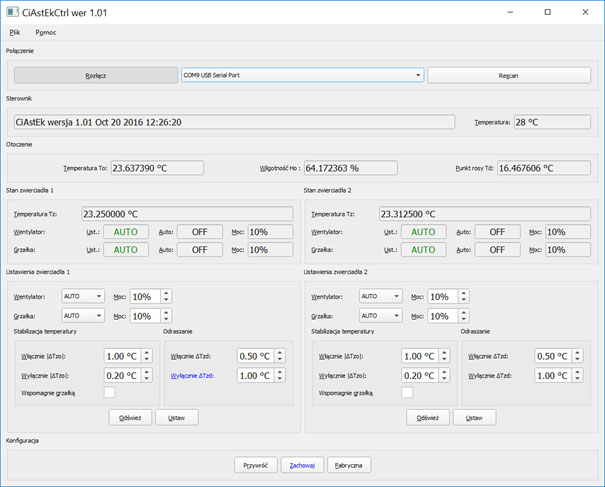
CiAstEkCtrl - umożliwia skonfigurowanie sterownika układu elektrycznego teleskopu oraz monitorowanie parametrów jego pracy. Aplikacja współpracuje z programem wbudowanym sterownika układu elektrycznego teleskopu nadzorując proces stabilizacji temperaturowej i odraszania optyki systemu WFOV oraz zwierciadeł teleskopu NFOV.
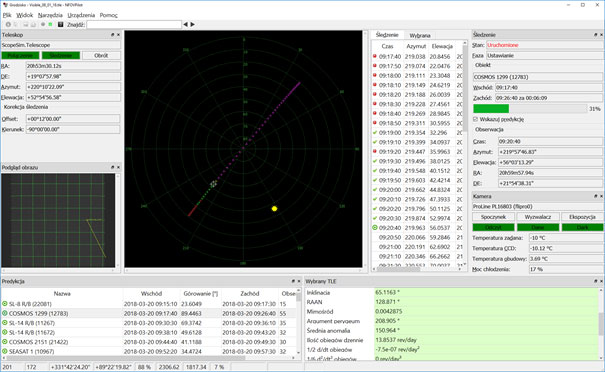
NFOVPilot – aplikacja sterująca teleskopem NFOV i akwizycją obrazu. Aplikacja pobiera z bazy danych parametry orbit satelitów wyznaczone przez program KTRecon podsystemu WFOV. Wyznacza predykcję ich przelotów i dokonuje selekcji pod względem kryteriów jakości spodziewanych obserwacji. Tworzy, a następnie wykonuje harmonogram śledzenia przelotów sterując napędem teleskopu oraz kamerą CCD w celu pozyskania obrazów śladów śledzonych satelitów. Sterowanie napędem odbywa się z wykorzystaniem korekcji uzyskanej z detekcji online śladów na pozyskanych obrazach w celu utrzymania śledzonego satelity w polu widzenia. Wynikiem działania aplikacji jest repozytorium plików FITS obrazów śladów satelitów wraz z danymi o ich położeniu na obrazie i momencie obserwacji.
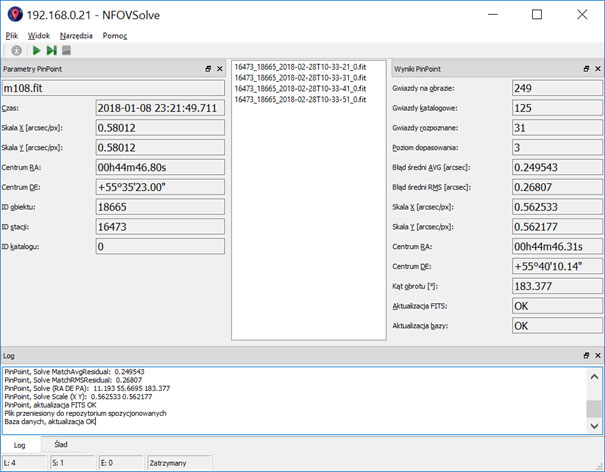
NFOVSolve – aplikacja podsystemu NFOV służy do automatycznej, masowej analizy obrazów repozytorium tworzonego przez aplikację NFOVPilot. Wynikiem analizy jest zapisanie w bazie danych rekordów zawierających precyzyjne położenia satelitów w układzie biegunowym oraz czasu ich obserwacji. Aplikacja wykonuje na obrazach operacje „Plate Solving” z użyciem katalogu gwiazd UNSO UCAC4 na podstawie której dla pozycji każdego śladu można przypisać jego precyzyjną pozycję biegunową. Pozycje biegunowe śladów wraz z danymi o miejscu i momencie obserwacji są danymi wejściowymi do wyznaczania orbit zarejestrowanych śladów satelitów.
NFOVRecon – aplikacja przeznaczona do analizy danych o śladach satelitów śledzonych przez podsystem NFOV zapisanych w bazie danych przez aplikację NFOVSolve. Wynikiem pracy programu NFOVRecon jest baza danych precyzyjnych parametrów orbit satelitów śledzonych przez podsystem NFOV.
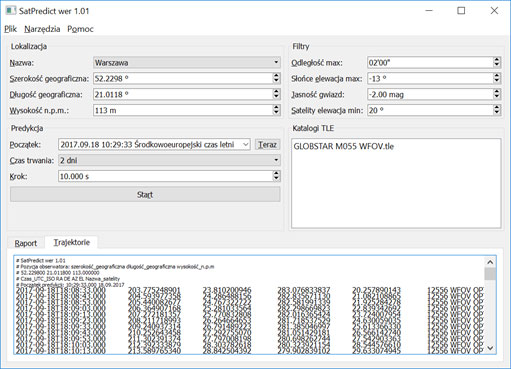
SatPredict – program przeznaczony jest do wyznaczania predykcji przelotów satelitów dla określonego miejsca obserwacji na podstawie parametrów orbity podanych jako plik TLE. Dodatkową funkcją programu jest wyznaczanie momentów bliskich przelotów satelitów w pobliżu gwiazd dla określonego miejsca obserwacji. Do wyznaczania pozycji satelitów program wykorzystuje modele matematyczne orbit satelitów SGP4/SDP4. Program SatPredict do wyznaczania pozycji gwiazd wykorzystuje katalog Tycho-2. Program wykorzystywany był na etapie opracowania systemu do przeprowadzania symulacji i planowania obserwacji testowych.
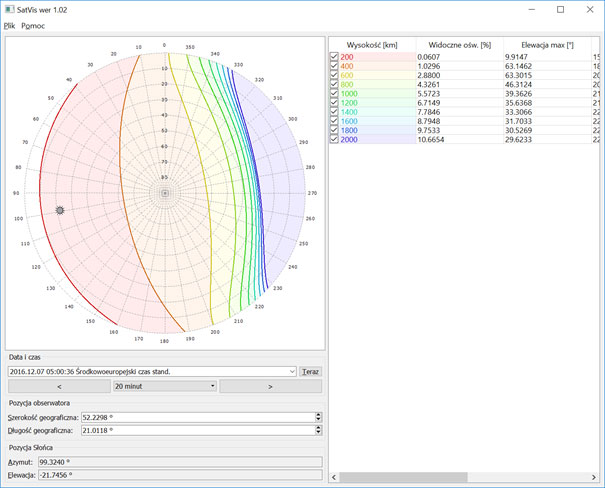
SatVis – program jest przeznaczony do wizualizacji widoczności satelitów o danych promieniach orbit poruszających się w związku z tym na określonych wysokościach nad Ziemią. Widoczność satelity jest rozpatrywana w odniesieniu do jego położenia względem horyzontu obserwatora jak również jego oświetlenia czyli położenia w stosunku do stożka cienia Ziemi. Program służy do planowania momentów widoczności określonej orbity w zależności od dobowego oraz rocznego ruchu Słońca po sferze niebieskiej.